Roboter- und Laserbasierter 3D-Druck mittels KI-Unterstützung zur nachhaltigen Reparatur von Unterwasser-Stahlstrukturen
Bundesministerium für Forschung, Technologie und Raumfahrt (BMFTR)

Für das Forschungsvorhaben „RoLaKI“ haben sich das Institut für Informationsverarbeitung (TNT) der Leibniz Universität Hannover, die OFTEC GmbH und das Laser Zentrum Hannover e.V. (Projektkoordinator) zusammengeschlossen, um den roboter- und laserbasierten 3D-Druck mittels KI-Unterstützung zur nachhaltigen Reparatur von Unterwasser-Stahlstrukturen zu entwickeln.
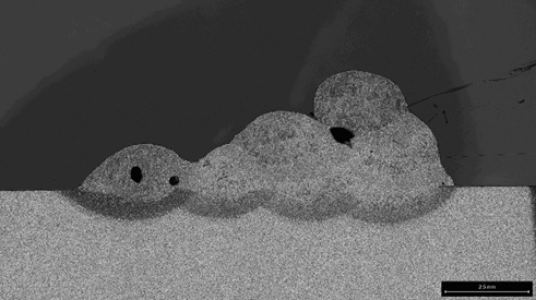
Das übergeordnete Ziel des Projektes besteht in der großflächigen Beschichtung von Unterwasser-Strukturen sowie der Möglichkeit, neue Strukturen an bestehende Bauteile „anzudrucken“, um eine nachhaltige und ressourceneffiziente Reparatur von Unterwasser-Bauwerken zu realisieren. Hierzu soll der roboter- und laserbasierten 3D-Druck unter Wasser mittels KI-Unterstützung entwickelt werden. Dafür muss ein erweitertes Prozessverständnis zum laserbasierten 3D-Druck unter Wasser erarbeitet werden, besonders wie sich die Prozessparameter auf den Lagenaufbau und somit auf das Bearbeitungsergebnis auswirken.
Mit den in Versuchen ermittelten Prozessergebnissen soll ein KI-System entwickelt und trainiert werden, welches die Auswirkungen der Prozessparameter auf den Schweißprozess selbstständig für verschiedenste Szenarien erlernt und für neue Schweißaufgaben optimale Prozessparameter prädiziert. Des Weiteren wird im Bereich der KI eine Bahnplanung angestrebt, welche darstellt, wie eine Schadstelle optimal zu reparieren bzw. zu beschichten ist. Auf Basis der gewonnenen Erkenntnisse aus der Prozessentwicklung soll eine Laserbearbeitungsoptik für den Einsatz außerhalb von Laborumgebungen entwickelt und gefertigt werden, die die optischen Komponenten sowie die für den Beschichtungsprozess notwendige Drahtzuführung vereint. Um die Laserbearbeitungsoptik unter Wasser positionieren zu können, wird zudem ein Handhabungssystem benötigt. Zum Erreichen der Schadstellen soll hierfür ein Unterwasser-Magnet-Crawler eingesetzt werden, der für die Anforderungen des laserbasierten 3D-Druckes weiterentwickelt wird. Der Druckprozess wird dann durch ein auf dem Crawler montiertes Feinpositioniersystem umgesetzt. Dieses muss in der Lage sein, die Schweißnähte wiederholgenau neben- und übereinander zu positionieren. Zum Abschluss des Projektes „RoLaKI“ soll ein Funktionsdemonstrator bereitstehen, mit dem sich der roboter- und laserbasierten 3D-Druck unter Wasser mittels KI-Unterstützung demonstrieren lässt.
Förderhinweis:
Das Bundesministerium für Forschung, Technologie und Raumfahrt (BMFTR) fördert das Verbundprojekt „Roboter- und Laserbasierter 3D-Druck mittels KI-Unterstützung zur nachhaltigen Reparatur von Unterwasser-Stahlstrukturen - RoLaKI“ zur Fördermaßnahme „Digital GreenTech - Umwelttechnik trifft Robotik“ im Rahmen der BMFTR-Strategie „Forschung für Nachhaltigkeit (FONA). (Förderkennzeichen: 02WDG1770)

Begleitvorhaben BRIDGE:
Das Begleitvorhaben „BRIDGE“ unterstützt die geförderten Verbundprojekte der Initiative „Digital GreenTech“ mit umfassender rechtlich-ethischer Expertise.
Projektkoordination:
Laser Zentrum Hannover e.V.
Projektpartner:

Leibniz Universität Hannover - Institut für Informationsverarbeitung (TNT), OFTEC Handelsgesellschaft für Oberflächentechnik mbH
Aktuelle News:
Erfolgreicher Kickoff der Fördermaßnahme am 25.11.2025 in Berlin
Erstes Arbeitstreffen am 14.01.2025 am LZH